Baochip のご紹介
bunnie | masto: @bunnie@treehouse.systems | bluesky: @bunnie.org
baochip | bluesky: @baochip.com

English (original)|この日本語版は Claude (AI) による機械翻訳です
Baochip のご紹介
- オープンソースの CPU を5つ搭載
- VexRiscv RV32IMAC+MMU @ 350MHz
- PicoRV I/O エンジン(「BIO」)×4 @ 700MHz
- オンチップ ROM 4MiB(「RRAM」)
- オンチップ SRAM 2MiB
- 暗号アクセラレータ、TRNG
- USB HS、カメラ、I2C、SPI、UART など
マイコン比較表:Dabao vs Raspberry Pi Pico 2、ESP32、Teensy 4.1、Adafruit Feather M4、BBC micro:bit v2
| 項目 | Dabao | Raspberry Pi Pico 2 | ESP32-DevKitC | Teensy 4.1 | Adafruit Feather M4 | BBC micro:bit v2 |
|---|---|---|---|---|---|---|
| メーカー | Baochip | Raspberry Pi Ltd | Espressif Systems | PJRC | Adafruit | Micro:bit Educational Foundation |
| MCU / SoC | Baochip-1x(シングルコア Vexriscv) | RP2350(デュアルコア Cortex-M33) | ESP32(デュアルコア Xtensa LX6) | NXP iMXRT1062(Cortex-M7) | SAMD51(Cortex-M4F) | nRF52833(Cortex-M4F) |
| クロック周波数 | 350 MHz | 150 MHz | 240 MHz | 600 MHz | 120 MHz | 64 MHz |
| I/O コプロセッサ | BIO(PicoRV ×4 @ 700 MHz) | PIO ブロック ×2(ステートマシン 8基) | ULP コア ×2(RISC-V / FSM) | FlexIO | SERCOM | なし |
| ハードウェアセキュリティ | 署名付きブート、TRNG、鍵ストア、ワンウェイカウンタ、RSA、ECC、ECDSA、X25519、SHA-256/512、SHA3、Blake2/3、AES;セキュアメッシュ、グリッチセンサ、ECC 保護 RAM | TrustZone、署名付きブート、OTP 鍵ストア、HW SHA-256、TRNG | eFuse セキュアブート + AES フラッシュ暗号化、HW RNG | HAB セキュアブート、AES-256 暗号化 XIP(ロック可能) | NVM の読み出し保護のみ | 読み出し保護のみ;HW 暗号なし |
| IRIS で検査可能 | 対応 | 非対応 | 非対応 | 非対応 | 非対応 | 非対応 |
| ブートローダがオープン | オープン | オープン | 非公開 | 非公開 | 非公開 | 非公開 |
| RTL がオープン | ほぼオープン | 非公開 | 非公開 | 非公開 | 非公開 | 非公開 |
| メモリ保護 | MMU | MPU + TrustZone | MPU 相当 | MPU | MPU | MPU |
| スワップメモリ | 対応(Xous + 外部 PSRAM) | 非対応 | 非対応 | 非対応 | 非対応 | 非対応 |
| Rust ネイティブ | 対応 | 非対応 | 非対応 | 非対応 | 非対応 | 非対応 |
| RAM | 2048 KB + I/O バッファ 256 KB | 520 KB | 520 KB | 1 MB | 192 KB | 128 KB |
| Flash | 4 MB(内蔵 RRAM) | 4 MB | 4 MB | 8 MB + SD スロット | 内蔵 512 KB + 外付け 2 MB | 内蔵 512 KB |
| Flash インターフェース | 内蔵 XIP(最大 1200 MB/s) | QSPI(XIP 約 56 MB/s) | QSPI(約 40 MB/s) | FlexSPI octal/quad(XIP 約 100 MB/s) | 内蔵 NVM(XIP 推定約 400 MB/s) | 内蔵 NVM(推定 20–40 MB/s) |
| GPIO ピン | 20 | 26 | 34 | 55 | 20 | 大ピン5 / 全19 |
| 無線 | なし | なし(W 版は Wi-Fi/BT 搭載) | Wi-Fi + Bluetooth 4.2 | なし(アドオンあり) | なし(Wing エコシステム) | Bluetooth 5.0 + 2.4 GHz |
| USB | USB-C(USB 2.0 HS デバイス) | Micro-USB(ネイティブ) | Micro-USB(CP2102 経由) | USB-C(ネイティブ、デバイス + ホスト) | Micro-USB | Micro-USB |
| 価格(目安) | $12 | $5–$7 | $8–$12 | $30–$35 | $20–$24 | $15–$18 |
| 向いている用途 | セキュリティ、高信頼性、汎用 | 汎用、MicroPython/C++ | IoT、無線接続 | オーディオ DSP、高速データ、USB MIDI/HID | CircuitPython、モジュール式 Wing 拡張 | 教育、子ども向け、授業でのコーディング |
出典:
[1] Pico 2 データシート · RP2350 データシート · Bootrom ソース
[2] DevKitC ユーザーガイド · ESP32 データシート
[3] Teensy 4.1 製品ページ · iMXRT1062 データシート
[4] Feather M4 ガイド · SAMD51 データシート
[5] micro:bit ハードウェア仕様 · nRF52833 製品仕様
[1] Pico 2 データシート · RP2350 データシート · Bootrom ソース
[2] DevKitC ユーザーガイド · ESP32 データシート
[3] Teensy 4.1 製品ページ · iMXRT1062 データシート
[4] Feather M4 ガイド · SAMD51 データシート
[5] micro:bit ハードウェア仕様 · nRF52833 製品仕様
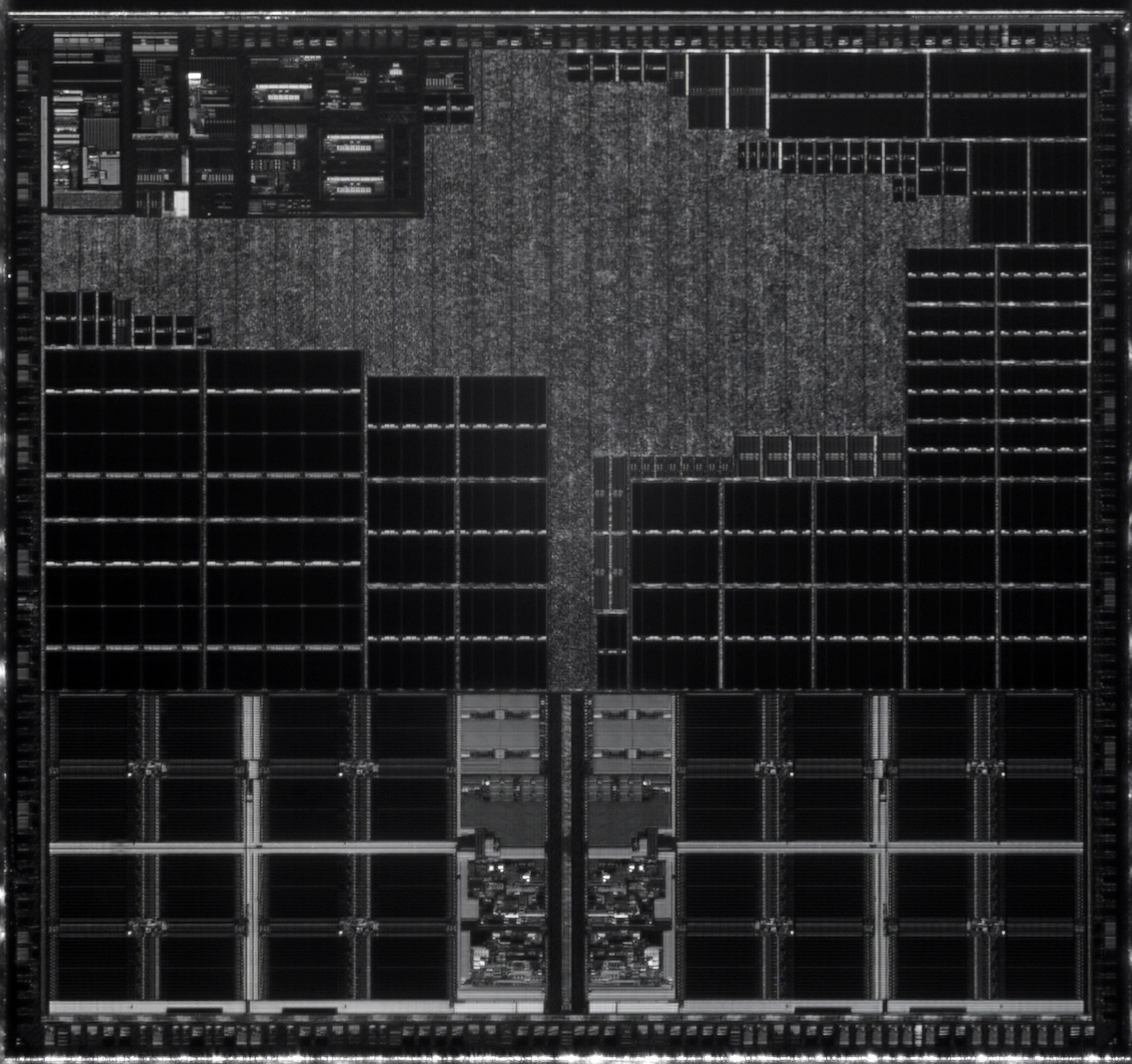
IRIS で検査できる
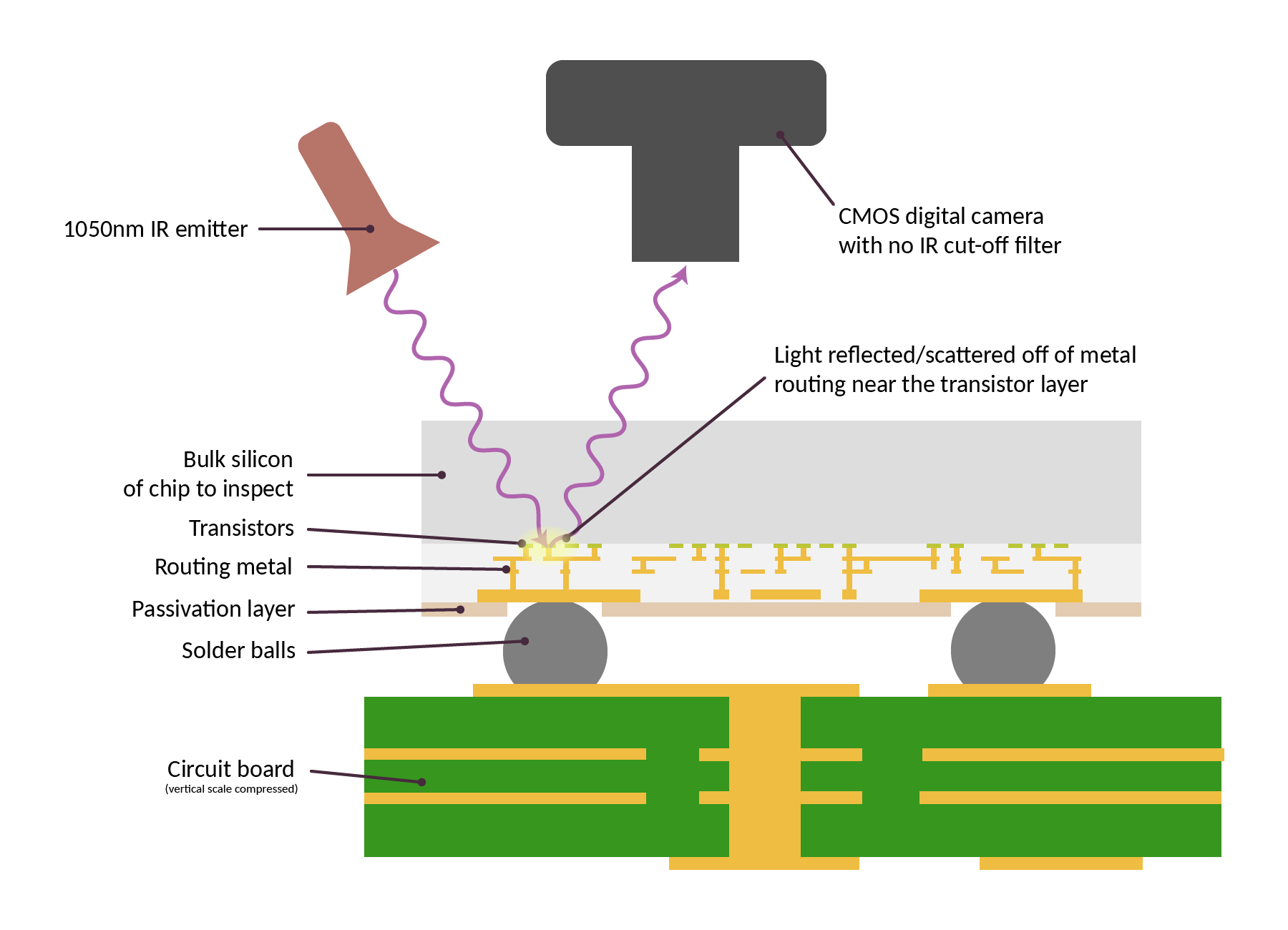
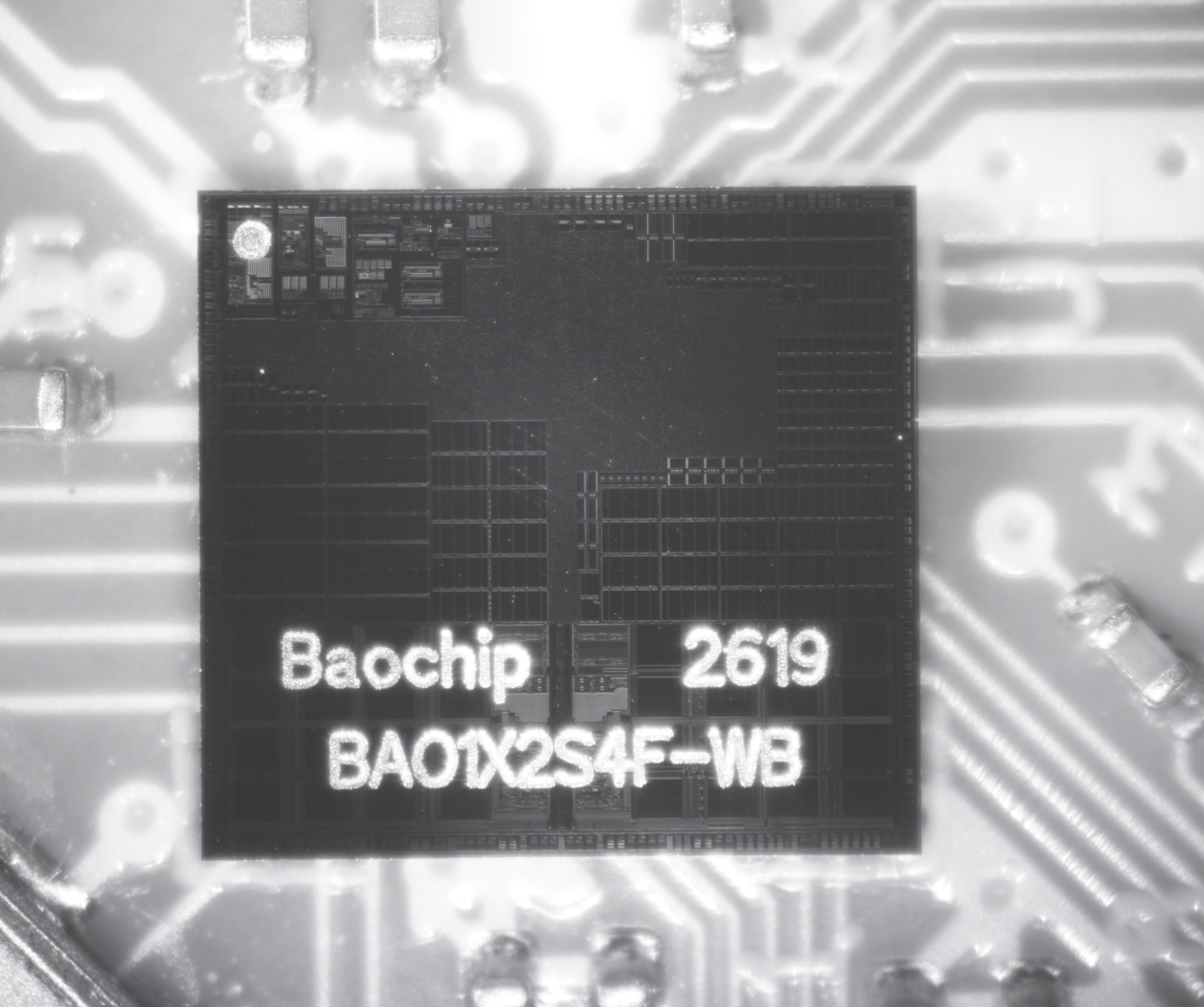
IRIS でチップの偽造が難しくなる

BIO で柔軟な I/O を実現
- BIO:Bao-I/O プロトコルエミュレータ
- トグルレート 25MHz 未満ならどんなプロトコルでも
- CAN
- LED テープ
- USB フルスピード
- I2C、UART、SPI など…
- あの謎なエアコンの赤外線プロトコルも…
- オープンソースで特許フリー!
- Raspberry Pi の PIO に似てるけど、こっちはオープンソース
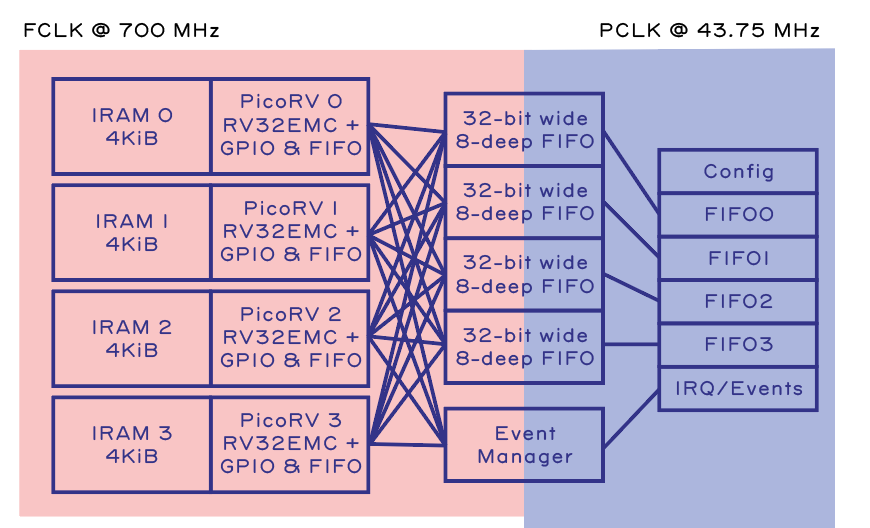
仕組み:BIO のアーキテクチャ
- RISC-V の CPU を想像してみてください…
- 下位16個のレジスタは「普通」
- 上位16個のレジスタは「ハードウェア機能」
- GPIO の設定/取得、ピンの方向
- イベント管理
- CPU 間の通信と同期

例:LED を「Blink(点滅)」させる
#include <stdint.h>
#include "bio.h" // これは必ず一番最初に書くこと
#define GPIO_PIN 21
void main(void) {
uint32_t output_mask = 1 << GPIO_PIN;
set_gpio_mask(output_mask);
set_output_pins(output_mask);
clear_gpio_pins_n(!output_mask); // Low に駆動
while (1) {
for(int i = 0; i < 10; i++) {
set_gpio_pins(output_mask);
}
for(int i = 0; i < 10; i++) {
clear_gpio_pins_n(!output_mask); // ピンを Low に駆動
}
}
}
LED を「Blink」:GPIO を設定する
マルチコア動作
// コア0 で動く
void main(void) {
uint32_t tx = 0;
uint32_t rx;
while(1) {
push_fifo1(tx);
rx = pop_fifo0();
tx = rx + 1;
}
}
// コア1 で動く
void main(void) {
uint32_t rx;
while(1) {
rx = pop_fifo1();
push_fifo0(rx + 1);
}
}
詳しく:CPU0 と CPU1 の間でデータを送る
BIO を試してみよう
- 詳しくは BIO-sim リポジトリをチェックしてください
- https://github.com/baochip/bio-sim
Baochip が生まれた経緯
オープンソース・シリコンの全体像
- PDK vs RTL
- PDK(process design kit)
- 実際のトランジスタや配線を記述する
- ファウンドリの企業秘密のため、オープンソース化が難しい
- オープンな PDK は古いノード(130nm、180nm)だけ。それ以外は(今のところ)クローズド
- RTL(Register Transfer Level)
- ハードウェアをコードで記述したもの
- Verilog、VHDL など
- 自分たちが設計する RTL は、オープンソースにできる
- CPU にオープンなアーキテクチャを選ぶこともできる
- 完全にオープンなハードウェアスタックでいずれ動くソフトを、今から作り始めることもできる!
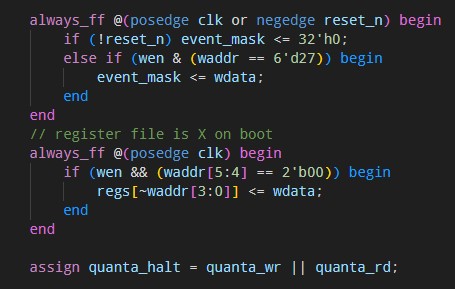
- RTL の例
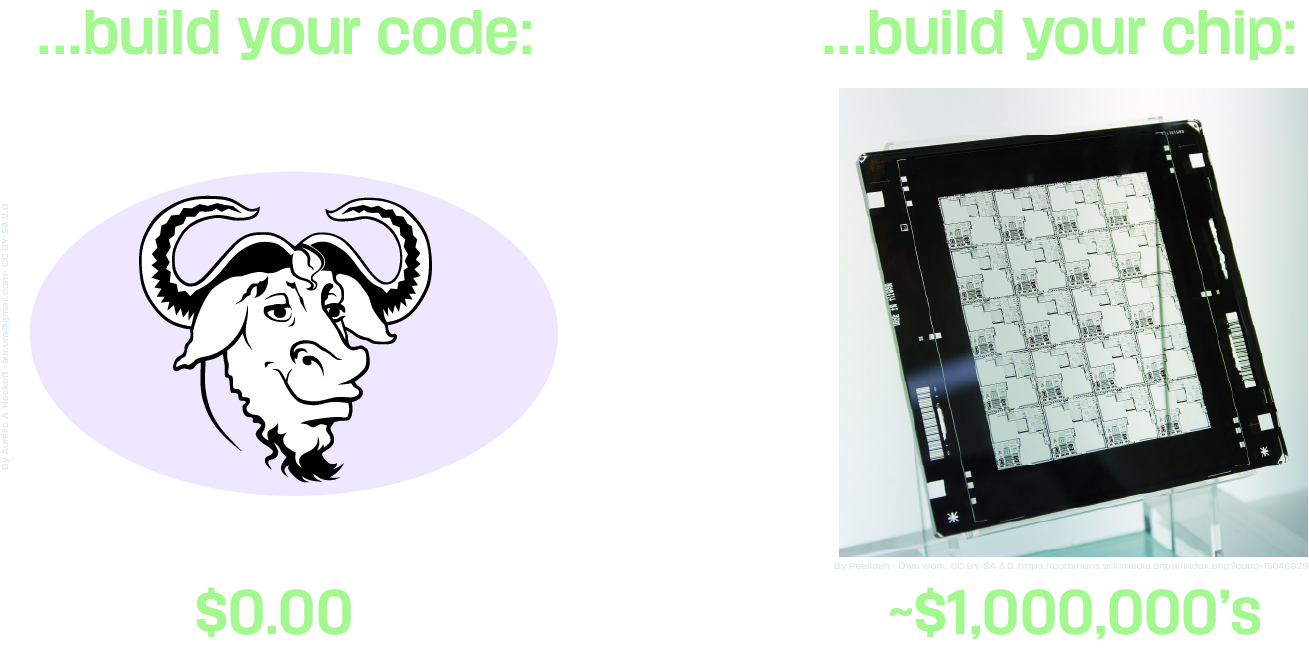
問題:チップは高い
コードを作るツール vs チップを作るツールのコスト
戦略:
オープンソースのコアを
商用テープアウトに「ヒッチハイク」させる
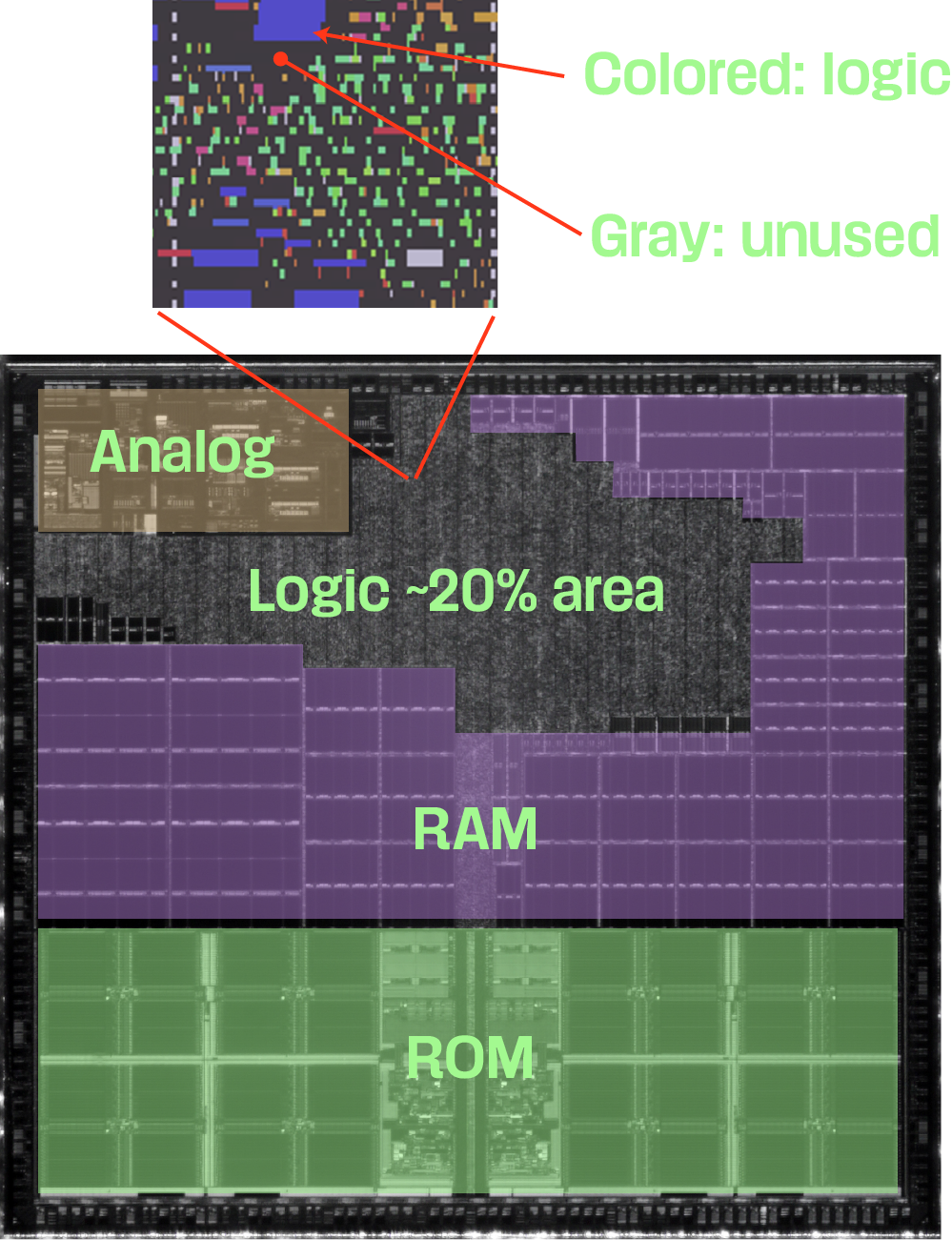
おさらい:微細ノードチップのロジック密度
- チップのサイズを主に決めるのは:
- メモリ
- I/O の外周
- ロジックは「気体」みたいなもので、
空いている空間を埋めるように広がる - 細かく見ると、けっこうスカスカ
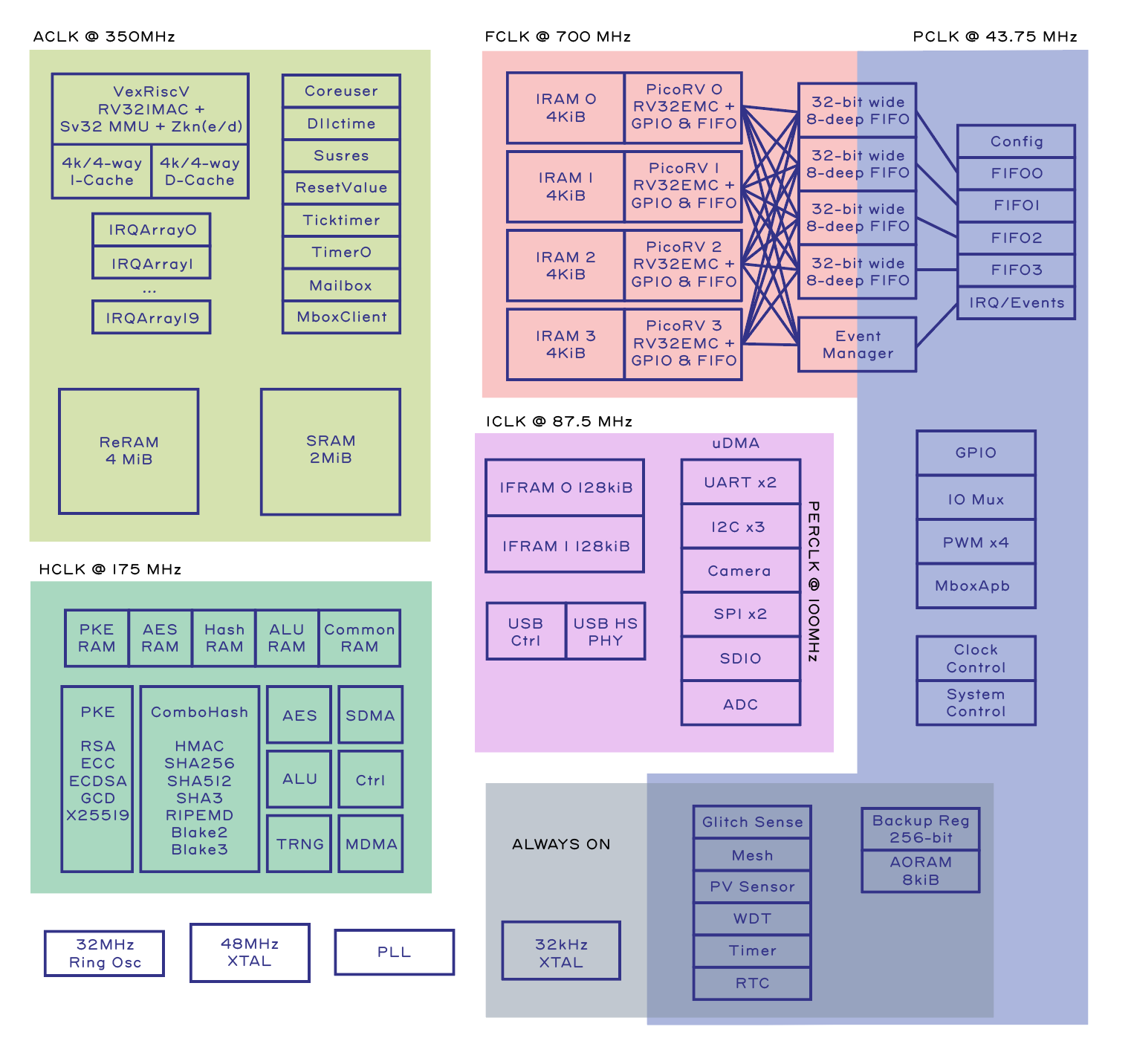
おさらい:典型的な SoC のブロック図
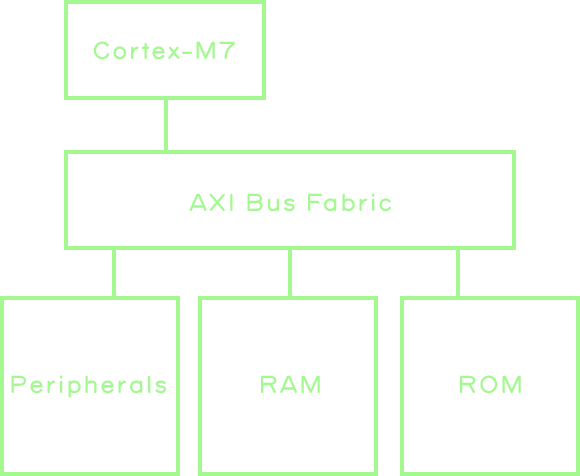
じゃあ…RISC-V コアを足すだけじゃダメ?
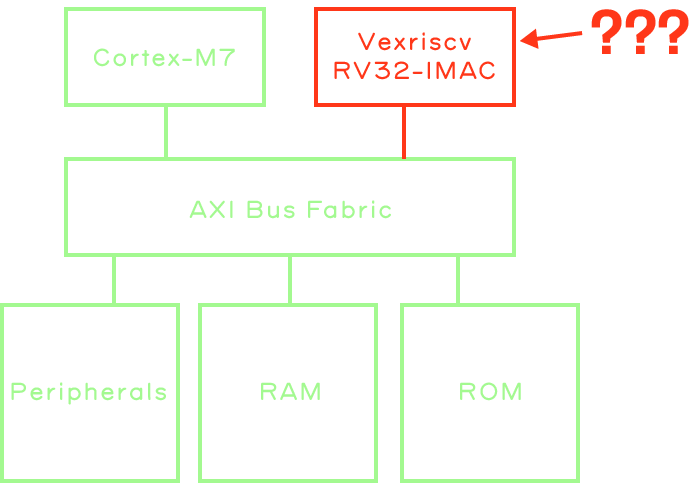
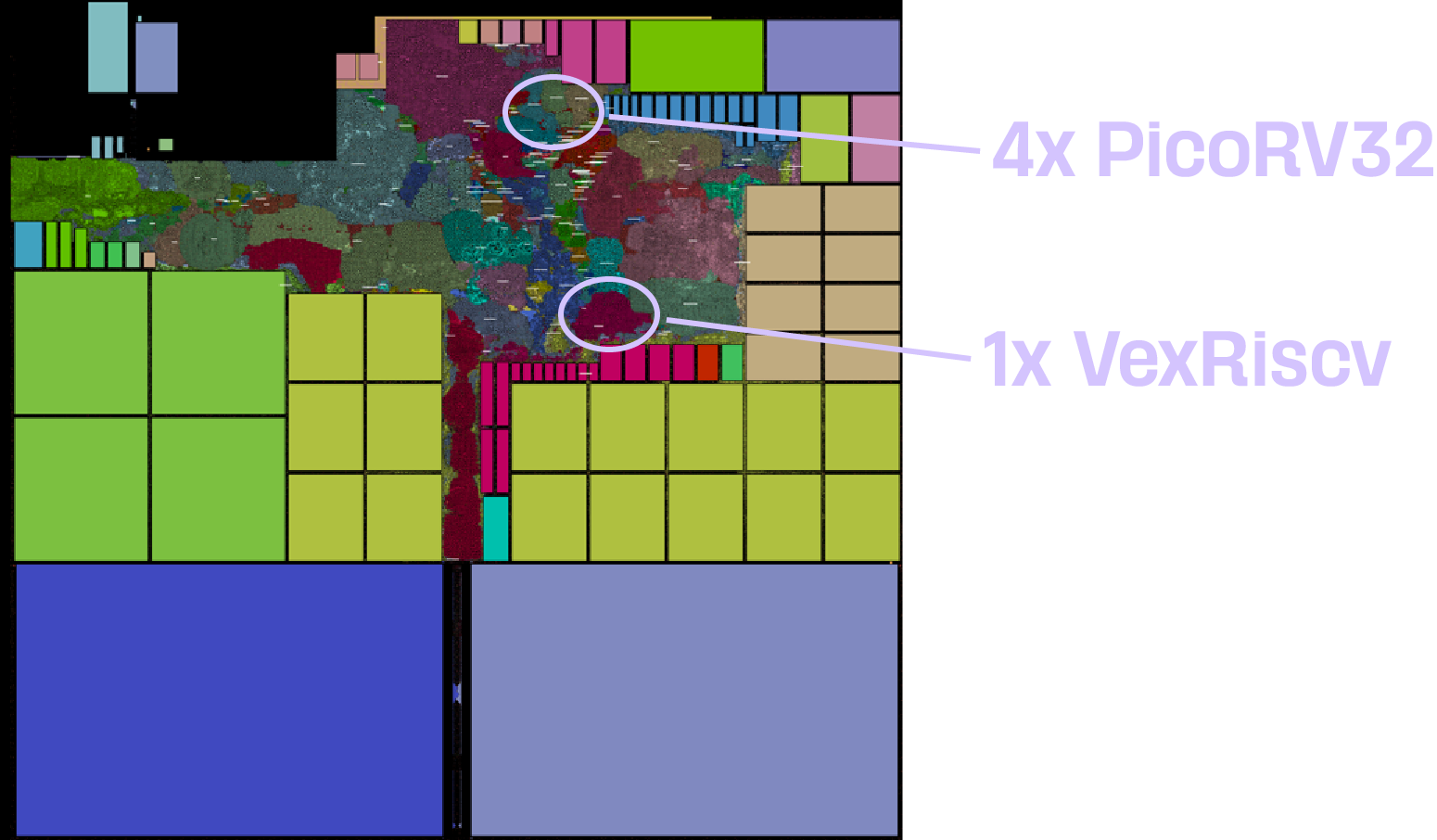
できます、しかも「タダ」!
- ダイ面積 2% 未満
- VexRiscv ×1 (MMU 付き)
- PicoRV ×4
- テープアウトの追加コストなし
- ロジックはスカスカ
- もっとロジックを詰め込める!
- ロイヤリティなし
さて…ヒッチハイクは理論上は可能、でも…
でも、こんな奴を誰が乗せてくれる?
図1.「ヤバそうな奴」
幸い、Crossbar はちょうど同じ方向に向かっていて、
止まって私に道を尋ねてきた…
結果:高信頼用途向けの
部分オープン RTL SoC「Baochip-1x」
Dabao のご紹介
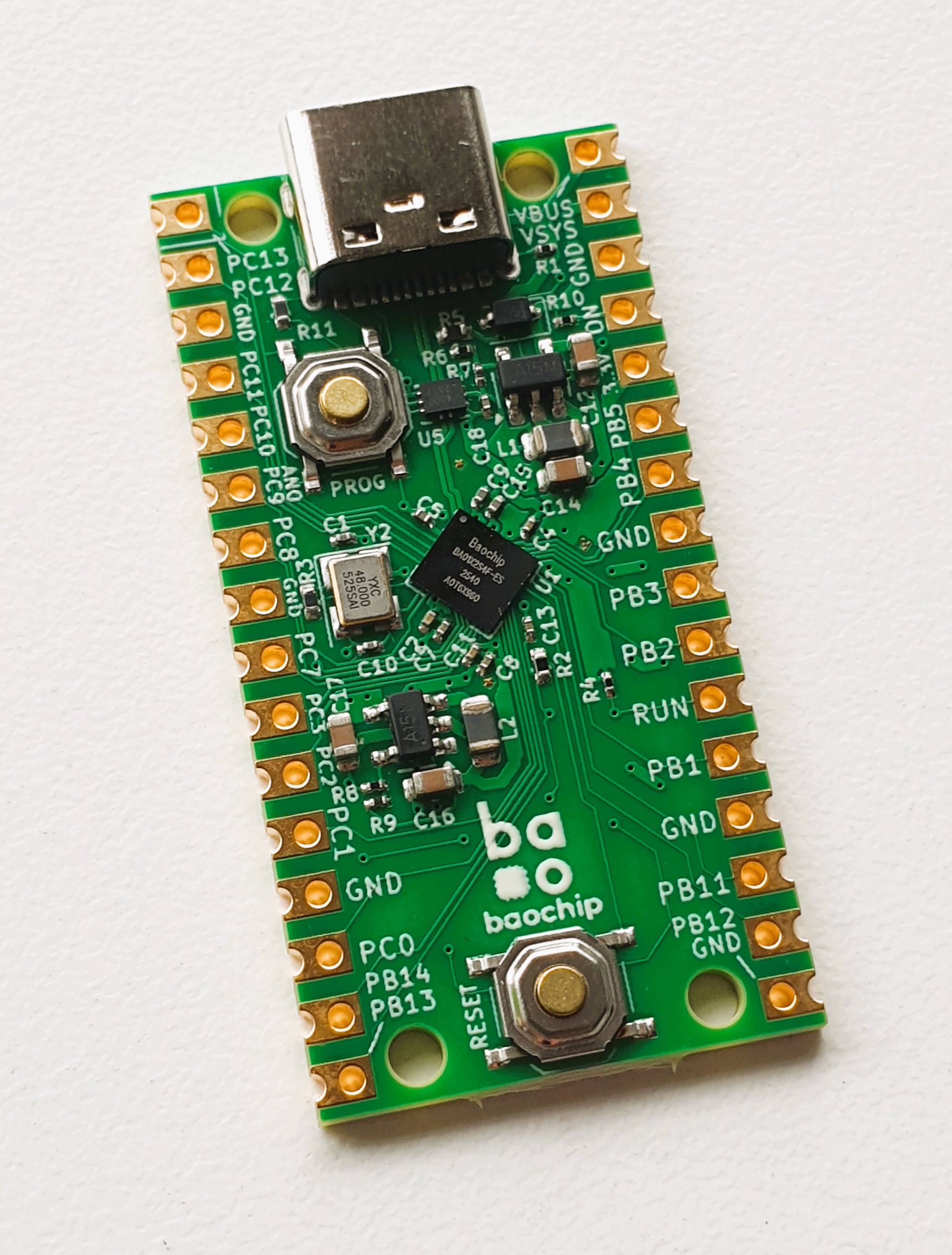
Dabao:Baochip-1x 評価ボード
- 「いちばんシンプルなボード」
- 2層基板
- JLCPCB で製造可能
- 全 I/O がピンに出ているわけではない
- Baochip-1x の CSP パッケージが高密度すぎる
- 配線できる I/O の一部だけ利用可能
- オンボードの電圧レギュレータ内蔵
- ソース:https://github.com/baochip/dabao
Dabao のピンアウト
Dabao の入手時期
- 最初の出荷は2026年6月、CrowdSupply の「アーリーアクセス」支援者向け
- 一般販売は2026年12月を予定
- 待ち時間が長い理由:ファウンドリが AI 関連の注文で「予約で満杯」
Baochip の OS「Xous」をざっくり紹介
Xous:Baochip-1x 向けの純 Rust 製 OS
- 一から Rust で書かれている
- MMU のおかげで仮想メモリを使える(デスクトップ OS みたいに)
- プロセス間はメッセージパッシング
- ソース:https://github.com/betrusted-io/xous-core/
git clone --depth 1 https://github.com/betrusted-io/xous-core/ cd xous-core git fetch --depth 1 origin tag v0.10.1 - Rust ツールチェーンが必要
- すでに入っている場合は「
rustup update」で最新化してください
- すでに入っている場合は「
- 複数ターゲットに対応。dabao 向けは以下でビルド
cargo xtask dabao dabao-console
Xous のコード構成

Xous はメッセージパッシング型 OS
- 各プロセスは独立した仮想メモリ空間で動作する
- メッセージは一度カーネルを「経由」して宛先へルーティングされる
- この例では:
- 「console」プロセスがカーネル経由で「log」にログメッセージを送る
- log がそのメッセージを受け取る
- log はそれを USB インターフェースへ流す
- (図にはないけど、ハードウェアシリアルにも流している)

ありがとうございました!
bunnie | masto: @bunnie@treehouse.systems | bluesky: @bunnie.org
baochip | bluesky: @baochip.com
Discord に参加しよう:
予備スライド
開発者体験:LED を点滅させる
- シェルに「blink」コマンドを追加
- HAL の IO サービスに接続
- ピンを設定
- ピンの値を切り替えながらループ
シェルの概要
- シェルは「dabao-console」にある
- シェルには REPL(Read-Eval-Print-Loop)があり、コマンドを受け取って「コマンドモジュール」に振り分ける
- これは「ver」コマンドモジュールの例
impl<'a> ShellCmdApi<'a> for Ver {
cmd_api!(ver);
fn process(&mut self, args: String, env: &mut CommonEnv) ->
Result<Option<String>, xous::Error> {
use core::fmt::Write;
let mut ret = String::new();
let helpstring = "ver [xous]";
let mut tokens = args.split(' ');
if let Some(sub_cmd) = tokens.next() {
match sub_cmd {
"xous" => {
write!(ret, "Xous version: {}", env.ticktimer.get_version()).unwrap();
log::info!("VER.XOUS,{}", env.ticktimer.get_version());
}
_ => {
write!(ret, "{}", helpstring).unwrap();
}
}
} else {
write!(ret, "{}", helpstring).unwrap();
}
Ok(Some(ret))
}
}
blink コマンド:サブコマンドを追加
- 「test.rs」モジュールに「blink」コマンドを追加
- blink のコードを apps-dabao/dabao-console/src/cmds/test.rs の 24 行目あたりに挿入
fn process(&mut self, args: String, _env: &mut CommonEnv) -> Result<Option<String>, xous::Error> {
use core::fmt::Write;
let mut ret = String::new();
#[allow(unused_variables)]
let helpstring = "test [proc] [freemem] [interrupts] [panic] [env]";
let mut tokens = args.split(' ');
if let Some(sub_cmd) = tokens.next() {
match sub_cmd {
"blink" => {
log::info!("Add blinky code here");
}
コマンド拡張をテスト
vscode 拡張を使って:
- 「Build-flash-monitor」をクリック
- 初回は、指示に従って Dabao のディスクとシリアルポートの場所を指定
- baochip の場所を設定
- ブートローダモードのシリアルポートを設定
- build-flash-monitor を押す
- 実行モードのシリアルポートを設定
- もう一度「monitor」を選ぶ必要があるかも
- 「[console]」プロンプトで「test blink」と入力
[console]
[console] test blink
INFO:dabao_console::cmds::test: Add blinky code here (apps-dabao\dabao-console\src\cmds\test.rs:25)
blink コマンド:点滅処理を追加
- 「IoxHal」オブジェクトを作る
- ポートと方向を設定
- PB4 なら、PB4 と隣のグランドピンの間に LED を1個挿せる
- ループを作る:
- ピンを High に
- 1秒待つ
- ピンを Low に
- 1秒待つ
- Build-flash-monitor
"blink" => {
use std::time::Duration;
use bao1x_api::{IoGpio, IoxDir, IoxHal, IoxPort, IoxValue};
let iox = IoxHal::new();
iox.set_gpio_pin_dir(IoxPort::PB, 4, IoxDir::Output);
loop {
iox.set_gpio_pin_value(IoxPort::PB, 4, IoxValue::High);
std::thread::sleep(Duration::from_secs(1));
iox.set_gpio_pin_value(IoxPort::PB, 4, IoxValue::Low);
std::thread::sleep(Duration::from_secs(1));
}
}